Levant, Arie ( formerly Levantovsky, Lev )

Professor of the Applied Mathematics Dept.
School of Mathematical Sciences,
Tel-Aviv University,
Ramat-Aviv.
Tel-Aviv 69978
Israel
E-mail: levant@tauex.tau.ac.il
Tel.: +972-3-6408812 (office), Fax: +972-3-6407543
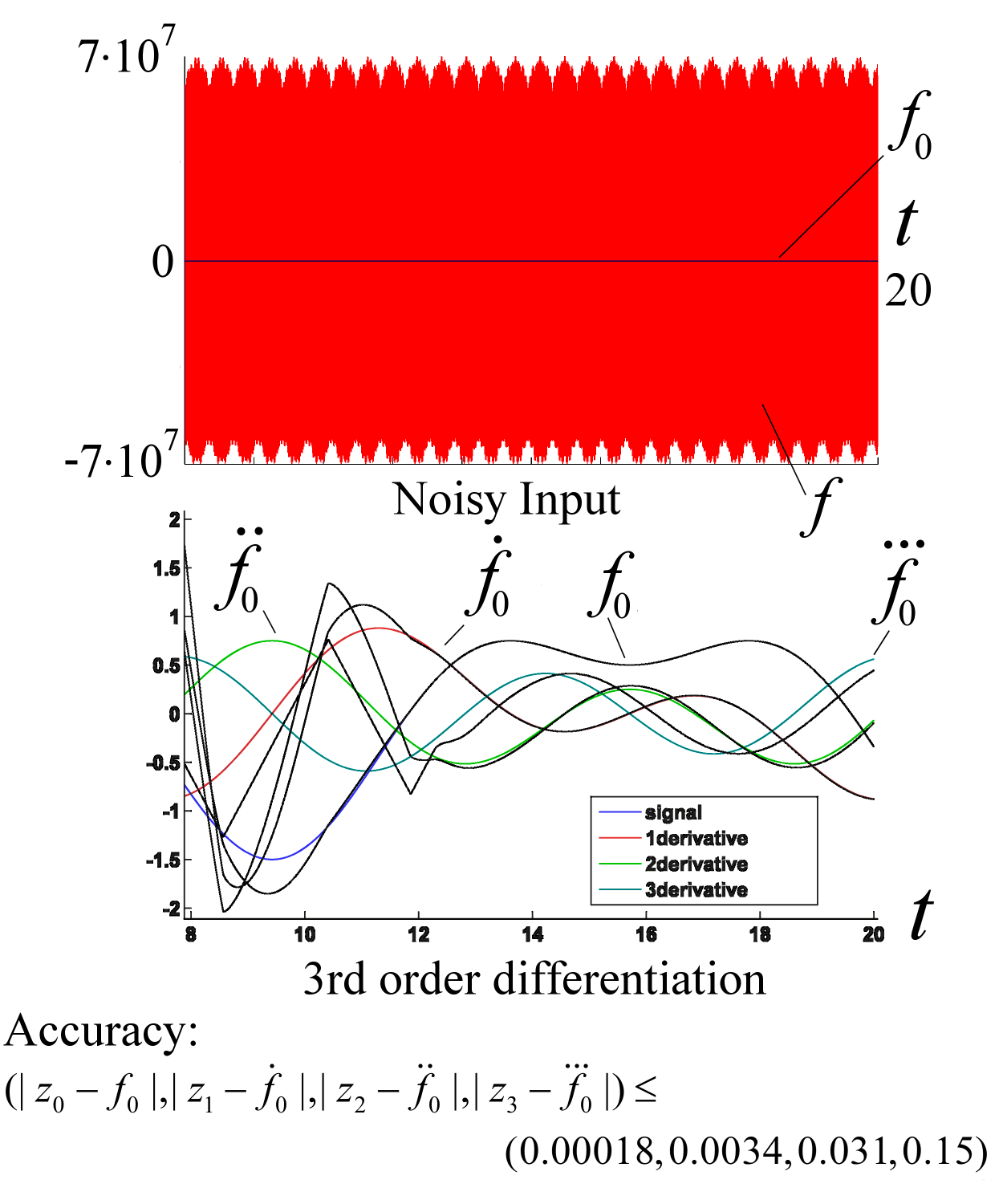
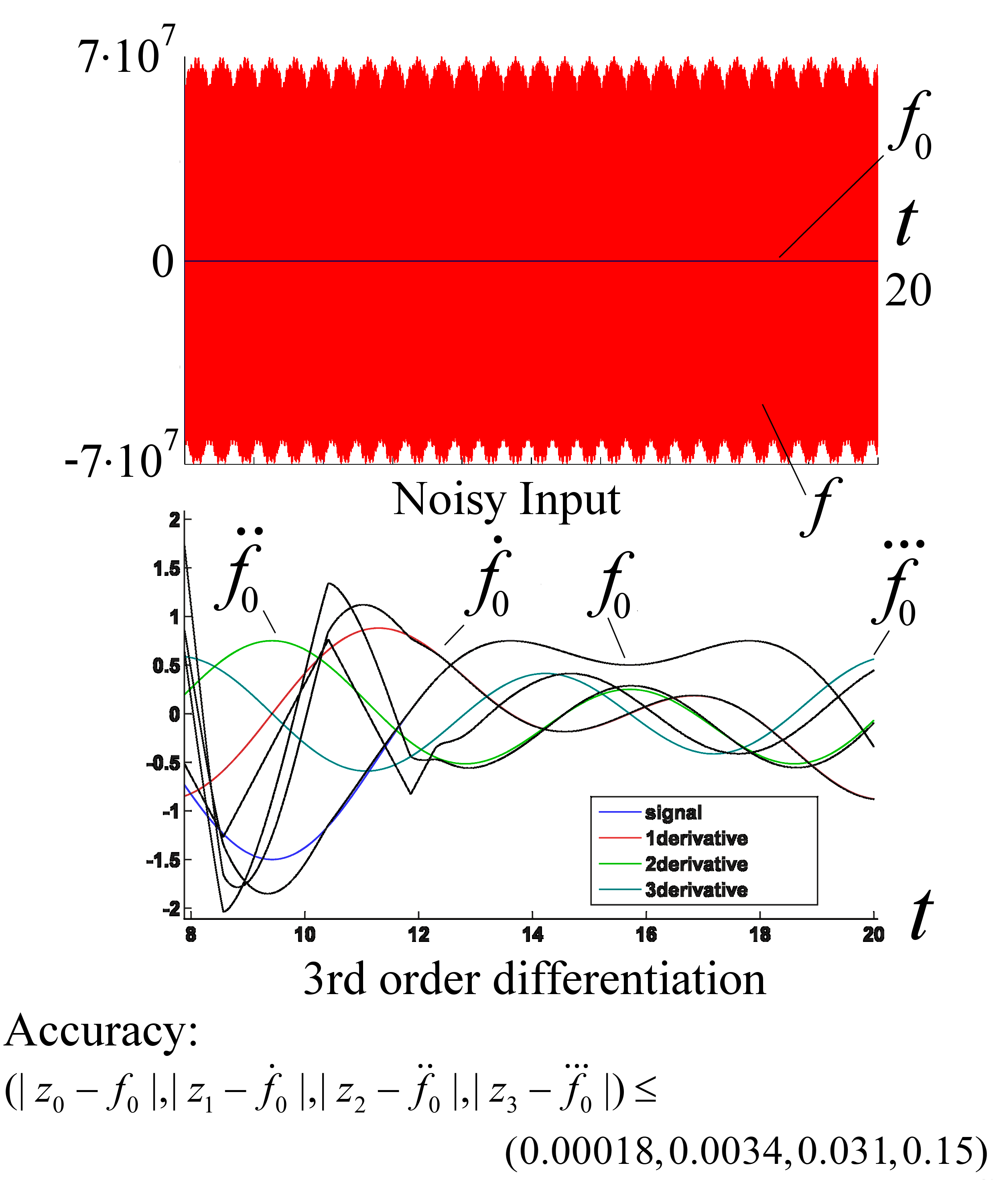
"Real-time" differentiation of the noisy signal f = f0 +h,
representing the "unknown" basic signal f0(t) = sin(0.5 t) + 0.5 cos(t)
corrupted by the noise
h = 107 cos(104 t)
- 2 107 sin(1.7 105 t) + 5 107
cos(1.33 105 t)
and sampled with the time period 10-5.
Filtering differentiator
of the order 3 and the filtering order 7 is applied
Teaching
My papers on Google Scholar
Spring 2025. Reception Hours: upon contacting in advance, Monday, 17:10 - 18:00 mainly in ZOOM,
Room 123b, Schreiber building.
Education:
1987 Ph.D. Thesis "Higher-order sliding modes and their application in control of uncertain
processes". Adviser: Prof S.V. Emelyanov. Opponent (secondary adviser): Prof M.A. Krasnoselsky.
1983-1987 Postgraduate studies in mathematical control theory, Institute for System Studies of the USSR Academy of Sciences,
Moscow.
1980 B.Sc. and M.Sc. from the Moscow State University, Faculty of Mechanics
and Mathematics, majored in the Theory of Differential Equations.
1980 M.Sc. Thesis "Singularities of Stability Region Boundary."
Scientific Adviser: Prof V.I.
Arnold.
Research Interests:
Nonlinear Control Theory, Sliding Mode Control, Homogeneous Discontinuous Control, Nonlinear
Finite-Time-Exact Tracking and Observation, Robust Exact High-Order Differentiation.
Main scientific results:
Establishment of new branches of the Sliding-Mode Control (SMC) Theory
- High-Order SMC and Homogeneous SMC; Real-Time Robust Exact Differentiation
Some papers in the PDF format:
Introduction of High-Order SMs:
A.Levant-Sliding order and sliding accuracy
in sliding mode control, International Journal of Control, 58(6),
1247-1263, 1993
S.V.Emelyanov,S.K.Korovin,A.Levant-High order sliding modes in control systems, Computational Mathematics
and Modeling, 7(3), 294-318, 1996
A.Levant-Robust exact differentiation via sliding
mode technique, Automatica, 34(3), 379-384, 1998
A.Levant,A.Pridor,R.Gitizadeh, I.Yaesh,
J. Z.Ben-Asher-Aircraft Pitch Control via Second Order Sliding Technique, AIAA Journal
of Guidance, Control and Dynamics, 23(4), 586-594, 2000
Proofs for the paper IEEE Transactions
on Automatic Control, 46(9), 2001, pp. 1447 - 1451 - see the paper in Int. J. of Control, 76 (9/10), 924-941, 2003
A.Levant-Universal SISO sliding-mode
controllers with finite-time convergence, IEEE Transactions on Automatic Control, 46(9), 2001, pp. 1447 - 1451
L.Fridman,A.Levant-Higher order
sliding modes.- in W. Perruquetti, J. P. Barbot, eds. "Sliding Mode Control in Engineering", Marcel Dekker, Inc., 53-101, 2002
Introduction of homogeneous
SMC:
A..Levant-Construction
principles of output-feedback 2-SMC design, in Proc. of the 41th IEEE CDC, Las-Vegas, Dec.10-13, 2002
A.Levant-Higher-order sliding modes,
differentiation and output-feedback control, Int. J. of Control,
76 (9/10), 924-941, Special issue on Sliding-Mode Control, 2003
A.Levant-Homogeneity
approach to high-order sliding mode design. - Automatica, 41(5),
823-830, 2005
A.Levant-Quasi-Continuous
High-Order Sliding-Mode Controllers , IEEE Transactions on Automatic Control, 50(11), 1812-1816, 2005
A.Levant-Homogeneous quasi-continuous
sliding-mode control. Lecture Notes in Control and
Information Sciences, 334, 143--168, "Advances
in Variable Structure and Sliding Mode Control", 2006
A.Levant-Construction principles
of 2-sliding mode design. Automatica, 43(4), 576-586, 2007
A.Levant-Finite
Differences in Homogeneous Discontinuous Control, IEEE Transactions on Automatic Control, 52(7), 1208 - 1217, 2007
A.Levant,L.Alelishvili-Integral
High-Order Sliding Modes, IEEE Transactions on Automatic Control, 52(7), 1278 - 1282, 2007
Proofs for High-Order Integral Sliding Modes - see here and here
Artificial
increase of the output relative degree:
L.Dorel(Alelishvili),A.Levant-On
Chattering-Free Sliding-Mode Control, in Proc. of the 45th IEEE CDC, Mexico, Cancun, Dec.9-11, 2008
A.Levant,Y.Pavlov-Generalized
homogeneous quasi-continuous controllers, Int.Journal of Robust and Nonlinear Control, 18(4-5), 385 - 398, 2008 - Special Issue: Advances in Higher Order Sliding Mode Control
A.Levant-Keynote "Homogeneous
High-Order Sliding Modes", 17th IFAC World Congress, Seoul, July 6-11, 2008
A.Levant,A.Michael-Adjustment
of High-Order Sliding-Modes (with ), Int.Journal of Robust and Nonlinear Control, 19(15), 1657 - 1672, 2009
A.Levant,L.Fridman-Homogeneous Sliding Modes in the Presence of Fast Actuators, IEEE Transactions on Automatic
Control, 55(3), 810 - 814, 2010
Full version of the paper "Accuracy
of Homogeneous Sliding Modes in the Presence of Fast Actuators" (with proofs)
Chattering Analysis:
A.Levant-Chattering
Analysis, IEEE Transactions on Automatic Control, 55(6), 1380 - 1389, 2010
A.Levant-Finite-time
stability and high relative degrees in sliding-mode control. Plenary Lecture at the 11th International Workshop
VSS'2010, Mexico-City, Mexico, June 26, 2010, published in Lecture Notes in Control and
Information Sciences, 412, 59-92, 2012
Introduction of Practical
Relative Degree:
A.Levant-Practical Relative
Degree Approach in Sliding-Mode Control. Plenary Lecture at the 12th Scientific Workshop VSS'11, Mumbay (India),
January 12-14, 2012, published in Lecture Notes in Control and Information Sciences, 440, 97-115, 2013
Feasibility of fixed-time convergence:
A.Levant-On Fixed and Finite Time Stability in Sliding Mode Control.
Corrected version. In_Proc._of_the 52th IEEE Conference on Decision and Control, CDC 2013, Florence, Italy, December
10-13, 2013
Arbitrary convergence-time function realization, including
acceleration of MIMO finite-time convergence up to fixed-time convergence
Y.Dvir, D.Efimov, A.Levant, A.Polyakov, W.Perruquetti-Acceleration of finite-time-stable homogeneous systems,
Int. Journal of Robust and Nonlinear Control, 28(5), 1757 -
1777, 2018
Discretization of homogeneous SMC:
A.Levant,M.Livne-Uncertain disturbances' attenuation by homogeneous MIMO sliding mode control and its
discretization, IET Control Theory & Applications, 9(4), 515-525, 2015
S.Ding, A.Levant, S.Li - Simple homogeneous sliding-mode controller, Automatica, 67(5),22-32,2016
A.Levant,
M.Livne - Weighted homogeneity and robustness of sliding mode control, Automatica, 72(10),186-193,2016
A.Levant,
M.Livne, D.Lunz-On Discretization of High Order Sliding Modes, in Barbot,Fridman,Plestan (eds) "Recent Trends
in Sliding Mode Control", 177-202,IET,2016
General
weighted homogeneity of differential inclusions:
A.Levant,
D.Efimov, A.Polyakov, W.Perruquetti-Stability and Robustness of Homogeneous Differential Inclusions,CDC 2016, Las-Vegas,
December 12-15, 2016
Asymptotic
optimality of SM-based differentiators:
A.Levant,
M.Livne, X.Yu-Sliding-Mode-Based Differentiation and Its Application, 20th IFAC World Congress, Toulouse, July 9-14, France, 2017. A typo has been corrected in the simulation
section.
Universal
homogeneous control templates:
A.Levant-Non-Lyapunov
SISO homogeneous control design, IEEE CDC2017
Fast-convergent
SM-based differentiators with variable gains:
A.Levant,M.Livne-Globally
convergent differentiators with variable gains, Int.J. of Control, published online March 2018
A.Levant-Filtering
Differentiators and Observers, VSS, Graz, Austria, July 9-11, 2018
Lecture
"Black-Box Control in Theory and Applications" at the Dalian Maritime University, Dalian, China, August
29, 2018
Lecture
"Robust Exact Real-Time Differentiation" at the Dalian Maritime University, Dalian, China, August 31,
2018
Filtering
unbounded noises in differentiation (still exact without noises!):
A.Levant,X.Yu-Sliding
Mode Based Differentiation and Filtering, IEEE TAC, 63(9), 3061-3067, 2018
Filtering
theory:
A.Levant,M.Livne-Robust
exact filtering differentiators,European Journal of Control, 2019
A.Levant-Homogeneous
filtering and differentiation based on sliding modes, IEEE CDC'2019
Presentation of Filtering Differentiators
(December, 2019)
Discretization of differentiators, event-triggered sampling:
M.Livne,A.Levant-Proper
discretization of homogeneous differentiators, Automatica, 50(8), pp. 2007-2014, 2014
J.-P.Barbot,A.Levant,M.Livne,D.Lunz-Discrete differentiators based on sliding modes,Automatica, 112, 2020
New advancements
SMC for students: survey-tutorial,
2019, updated in 2021
Lecture "Homogeneous Control and Observation of Uncertain SISO Systems", Dalian Maritime University,
China, July 27, 2020, Mexico, January 13, 2021 ZOOM recording of July 27, 2020
A.Hanan,A.Levant,A.Jbara-Low-chattering
discretization of homogeneous differentiators, IEEE TAC, 2022
A.Hanan, A.Jbara,A.Levant-Homogeneous sliding modes in noisy environments, in "Emerging Trends in
Sliding Mode Control Theory and Application", Springer, 2021
A.Hanan,
A.Jbara,A.Levant-Low-chattering discretization of sliding mode control, presented at IEEE CDC'2021, December 17
A.Hanan,
A.Jbara,A.Levant-Low-chattering discretization of sliding modes, in "Sliding-Mode Control and Variable-Structure
Systems: The State of the Art", Springer, 2023
Ring Tones
Kovalskie