OVERVIEW
KEY FEATURES
- Smooth animal position, velocity and acceleration
- Accurate isolation of the animal's stopping locations
- Segmentation of the animal's movement into lingering and progression
- Calculation of arena boundary
- Calculation of wall/center threshold
- Isolation of incursions
Introduction
SEE stands for Strategy for the Exploration of Exploration. The software was developed for the last two decades in order to analyze the structure of rodent locomotor behavior, and provide measures (also termed in behavior genetics behavioral endpoints) that are based on intrinsic geometric and statistical features of the behavior. The software was originally intended for studies involving mice and rats, but has since proved useful for drosophila and even human babies.
The software requires only a set of tracking coordinates, estimated by any tracking system. The following sections provide an overview of the features of SEE, and why they are needed.

Path smoothing
Overview
The raw coordinates of the animal's position in space produced by any tracking system is subject to three inherent kinds of "noise" sources:
- Error in measurement
- Outliers
- "Body wobble" - small local movements of the animal
The cumulative impact of these errors could have devastating effects on the analysis results, even in seemingly trivial measures such as Distance Travelled and velocity. The SEE Path Smoother was designed to handle all three types of "noises".
Features
- Robust smoothing by LOWESS
- Identification of arrests - Repeated Running Medians
- In RSEE only - Smoothing fit for free exploration
What is LOWESS and why use it?
LOWESS is a method which uses a moving time window, constructed around each data point. The data within each window is fitted with a polynomial using least squares optimization. The distances of the data from the fitted polynomial are then calculated, and used as weights for a second polynomial fitting - the larger the distance the smaller the weight. Thus outliers, whose distance from the first polynomial is large, contribute little to none to the smooth function.
Furthermore, the first and second derivatives of the LOWESS polynomial in each window are taken as smooth estimates for speed and acceleration respectively. These estimates have proved more accurate than any other smoothing method (Hen et al., 2004), such as the popular Moving Average, which tends to increase the speed at stops and severely decrease it at high speed motion segments
Arrests and Repeated Running Medians
An "arrest" is an interval where the animal freezes in place (zero speed), a common trait for both mice and rats, which separates intervals of motion. As arrests are integral parts of the animal's spatial behavior, identifying them correctly is essential. Unfortunately, the LOWESS is unsuitable for this goal, as it smoothes the speed during arrests, and creates an illusion of movement. A better solution is the Running Medians method. (RM)
Running Medians is a method which uses a moving time window, where the median is taken in each window. Repeated Running Medians repeats RM several times with different window sizes. RRM does not smooth the data, making it unsuitable for estimating the animal's position, but rather brings close points closer together and eliminates measurement errors and body wobble during arrests. In intervals identified as arrests, the estimation of the speed from the LOWESS is set to zero.
Smoothing in free exploration
"Free exploration" is an experimental setting in which the animal has a home cage outside the arena, and is able to move between them freely. This setting requires the smoothing method to exclude intervals in which the animal hidden from the camera. A solution to this problem is implemented in RSEE.
Path segmentation
Overview
The Path Segmentor was designed to segment Open Field data into sequences of stops (lingering episodes) and progression segments. The Path Smoother has divided the session into motion segments and arrests, and the Path Segmentor fits a Gaussian mixture model to the frequency distribution of the maximal speeds of the motion segments, using the Expectation-Maximization (EM) algorithm).
Arena builder
Overview
Measuring the behavior of the animal in the center of the arena is very popular in anxiety-related studies. However, separating the movement along the wall from the movement in the center is frequently based on some arbitraty distance from the wall, and on imprecise user defined arena settings. The SEE Arena Builder estimates both the arena boundary and an intrinsic threshold between wall and center movements, as well as identifies incursions (progression segments in the center) and wallcursions (progression segments along the wall)
Note: SEE Arena Builder is designed for circular arenas only. Smoothing and segmentation is unaffected by the shape of the arena.
Features
- Estimate the arena boundary
- Separate the wall and the center
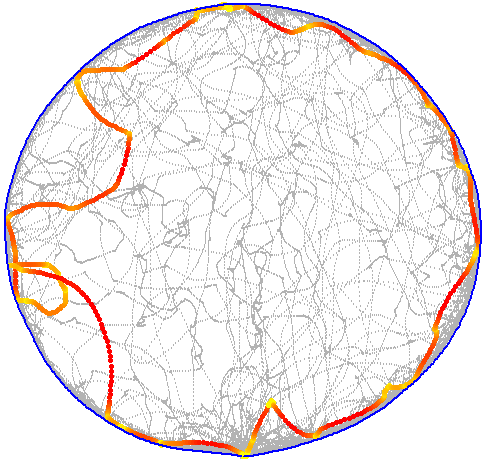
Arena boundary
In theory, a circular arena is characterized by a center point and a constant radius. In practice, a perfect circular arena is very hard to achieve, and minor imperfections could have great effects on distances from the wall and on radial speeds. The Arena Builder algorithm estimates the actual shape of the arena, which is used to estimate the radial distances and speeds. The full algorithm is detailed in Sakov et al., 2010.
Wall/center separation
The Wall/Center Separation Procedure separates the path of the mouse into intrinsically defined components of movement along the wall and in the center of the arena (see Lipkind et al., 2004,) - incursions and wallcursions. An incursion is an episode in which the animal stayed beyond the wall/center threshold, and includes at least one progression segment.
Supported by European Research Council under the uropean Community’s Seventh Framework Programme, ERC grant 294519 (PSARPS)