The most versatile I2C
chips that you can connect to the NXT, or to any I2C
bus, are microcontrollers. Microcontrollers, or MCUs for short, are
chips that include a processor, non-volatile memory for storing
programs and data, memory for variables, and some peripheral devices
(peripherals), such as analog-to-digital converters, timers, digital
input/output controllers, and more. A microcontoller is basically an
entire little computer on a single chip. The processor of the NXT,
which
runs the firmware and your programs, is a microcontoller. In fact, the
NXT contains two more MCUs, one to control the motors and perform
analog-to-digital conversions, and the other to control the Bluetooth
radio. The standard ultrasonic sensor also uses an MCU.
Why would you put a microcontroller in a sensor (or whatever
gadget you connect to the NXT) when the NXT already contains a
microcontroller? After all, everything the external MCU can do, the
NXT's main processor can do too. The main reason for using an MCU in a
sensor is speed. The NXT's processor is fast, but its communication
with the outside world is not so fast. So a helper processor that can
react very quickly can be helpful. The ultrasonic sensor is a good
example. It sends a short burst of sound and waits for the echo. The
time it takes the echo to come back determines the distance to the
object that returned the echo. At at distance of 17cm, for example, the
echo would return after one millisecond. The NXT cannot measure
external events at this resolution, but an external microcontroller
can, and it can later report the measurement to the NXT.
In this
project, I use a small MCU to produce remote-control
signals. The MCU listens to commands that the NXT sends it via I2C.
The I2C command tells it what code to
send via the infrared remote control. This allows the NXT to turn off a
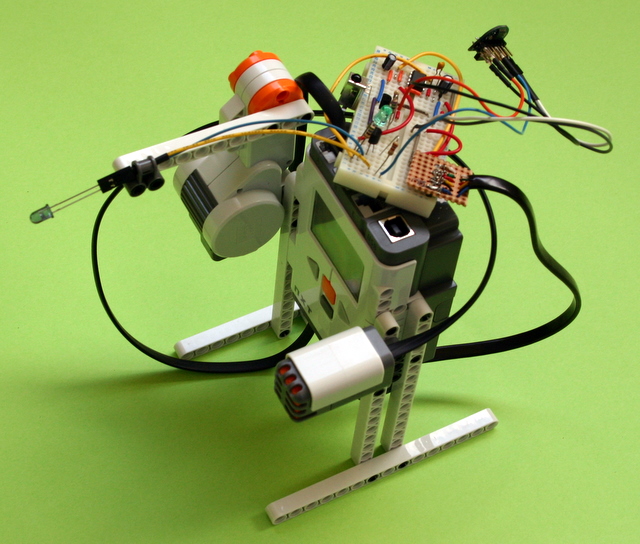
television, or to turn its volume up and down, etc. The robot that you
see in the movie listens to the television (using the sound sensor). If
the volume is too loud, it raises its arm, which is fitted with an
infrared LED, and sends a remote-control signal to turn the television
off. Robots can be very strict.
The NXT cannot control the infrared LED at the
required speed to produce remote-control signals. Therefore, using an
MCU to perform this task makes sense. I don't think there is a
specialized chip that can do this task. Chips that send remote-control
signals are designed to be controled by a keypad, not by an I2C
bus, so even if you can find such a chip, connecting it to the NXT
would be a challenge.
Warning: connecting your NXT to any home-made
gizmo (like the
one described here) can damage it. Beware.
The Microcontroller and How to Program It
I used for this project an MCU called MSP320F2012. The MSP430
is the family name of the chip. Microcontrollers come in families,
often with dozens of different chips. The different chips in a family
have different peripherals, different amounts of memory, and so on. The
MSP430 is a family of MCUs made by Texas Instruments. These chips are
designed mainly for low-cost battery-operated devices. This means that
they are cheap (the chip I used costs about $2.50 in small quantities),
in many applications they do not require many external components,
which also reduces cost, and they use very little power.
There are many families of MCUs: PIC processors from
Microchip, AVR from Atmel, ARMs (from many manufacturers), and many
more. Within each family there are many different chips. How do you
choose one? My considerations in this project were:
The chip should have an I2C
interface; although it is possible to program an MCU to
perform I2C
communication even if it does not have a dedicated hardware peripheral
for this, it is not a trivial programming task.
I wanted a small MCU that requires at most a few milliamps
of current.
It should come in a packaging that can be easily used for
prototyping.
Most importantly, I wanted an MCU that with is easy to
program. By "program", I do not mean that the program should be easy to
write; I mean that it should be easy to download the program into the
MCU.
The last point is perhaps the most important one for smal
projects. You write the program for the MCU on your PC, but you need to
somehow download it into the memory of the MCU. This action is called programming. Small
MCUs do not have any interfaces that can be directly connected to a PC
(say USB interfaces). Some of them have serial interfaces called UARTs
that can be connected to a serial port of a PC, but this requires
another chip. Only high-end MCUs have USB interfaces. Even when a chip
does have a UART or a USB interfaces, it does not mean that a blank
chip can be programmed using these interfaces.
Some MCUs require a dedicated piece of hardware called a
programmer. You plug the chip into the programmer, download the program
to it, and then take it out of the programmer and plug it into your
circuit. It is inconvenient to move the chip between the programmer and
the circuit, and the programmer is sometimes expensive. A more
convenient approach is called in-system programming,
or ISP. In this approach the chip has a few pins that are used for
programming it when it is already in the circuit. Sometimes these pins
connect directly to the USB or serial port in your PC, and sometimes a
specialized interfacing device is still needed. When a specialized
device is used, it can often allow a debugger running on the PC to
debug the program running on the MCU.
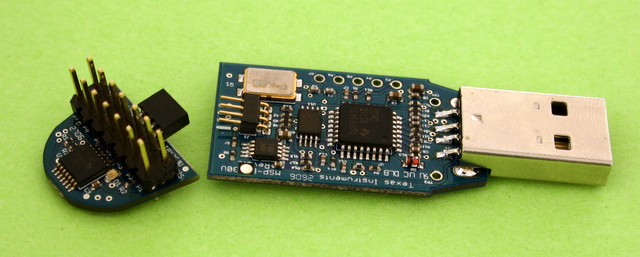
The chip that I selected has
a cheap and convenient programming mechanism. Texas
Instruments sells a $20 programmer called the EZ430 that comes with one
chip (an
MSP320F2013) on a little adapter board that is easy to integrate into a
circuit. The company also sells $10 sets of
three MSP320F2012's
mounted on the same adapter boards. You can see the setup in the
figure. You plug the little adapter board into the 4-pin connector on
the programmer, and you plug the programmer into a USB port (or more
conveniently, into a USB extension cord). The adapter board comes with
2 rows of connection pads that give you access to all 14 pins of the
MCU. I soldered header pins to them, to make it easy for me to connet
wires to the chip and to plug the adapter board into a socket.
Texas Instruments also supplies a free programming environment
called IAR Kickstart that allows you to develop C and assembler
programs for the MSP430, to download them into the chip using the
EZ430, and to debug them. This free environment is limited to small
programs, but for our purposes it is more than sufficient. There is
also a version of GCC, a free C compiler, for the MSP430.
Texas Instruments also supplies a set of simple example
programs that shows how to use the peripherals of the chip, and a large
set of application notes that shows how to use these chips in various
applications.
The MSP320F2012 (and the MSP320F2013, which is
similar except for a more sophisicated analog-to-digital converter)
also comes in DIP packages that are easy to use on a solderless
breadboard and on prototyping boards. You can program these versions
with the same USB programmer, but you need to connect the chip to the
4-wire connector. I plan to turn one of my adapter boards into an
extension cord for this purpose.
So, what's on the MSP320F2012? It contains 128 bytes of RAM
(yes, that's all), 256 bytes of flash for storing data, 2KB of flash
for storing programs, a timer, a serial interface that
supports I2C, an analog-to-digital
converter, and several clocks (internal oscillators). Every processor
needs a clock, and most processors require an external crystal to
stabilize the clock frequency. The MSP430F2xxx series have clocks that
use an external crystal, but also two clocks that don't need any
external components: a very slow clock that leads to very low power
usage, and a high frequency clock is fairly stable and accurate (to
within about 1% or 2%). I used the internal high-frequency clock. Its
accuracy is good enough for remote controls. The chip even has
pull-up and pull-down resistors that you can connect
to any pin under program control, so you don't even need the usual
pull-up resistors for the I2C bus.
One somewhat annoying aspect of these MSP430 processors is
that their supply voltage is limited to 3.6 volts. They do run on a
wide range of voltages, from 1.8 to 3.6 volts. This allows them to run
on a pair of 1.5 volt batteries or on a single 3 volts battery and to
remain functional when the battery voltage drops as it is drained. But
they cannot run directly on the 4.3V supply of the NXT. I therefore
used a 3.3V regulator to power the MCU. If you use a different
microcontroller that can run on an unregulated supply that can range
fro 4 to 5V, you can connect it directly to the NXT's power line
without a step-down regulator.
Microcontrollers are fairly complex chips, and there is a huge
variety of them, so it can be a challenge to choose one. For small
projects, the cost and convenience of the programming mechanism is
probably the most important aspect. My choice is certainly not the only
reasonable one and perhaps not the best one, but I think that it is
reasonable.
Silicon Bugs
The complexity of microcontrollers means that their
implementation sometimes contains errors. It costs a lot to fix these
errors, so the manufacturer often continues to produce chips with bugs.
From the programmer's point of view, these bugs mean that the chip does
not always behave as the manual. The user manual often cover many
different chips from the same family, some of which and some of which
do not have a given bug. So the user manual describes how the
chip should
behave, even in case of bugs. A different document, called an errata,
describes which chip has which bug, and if possible, how to get around
the bugs.
You may think that these bugs are rare, but they are not so
rare. I bumped into a bug in the I2C hardware in
the MSP320F2012. The bug affected even the example program
that Texas Instruments supplies to show how to use the chip as an I2C
slave, which didn't work! Fortunately, I found a working example
program that was posted to the MSP430 group on Yahoo. I had a similar
experience with an ARM processor from Philips.
This is one of the drawbacks of working with MCUs as opposed
to simpler specialized chips. If your program does not work as you
think it should and a bit of analysis and debugging doesn't help, check
if a bug in the silicon is affecting your program.
Infrared Remote Control Protocols
There are several communication prototols that infrared remote
controls use. Most of them are based on the same principle. The
communication channel can be in one of two states that we will
call low
and high.
In the high state, the remote is sending pulses of infrared light at
some fixed frequency around 40KHz (each protocol uses a different
frequency, but they are all in the same neighborhood). An infrared LED
that is switched on and off sends these pulses. The 40KHz pulses modulates the base
infrared signal. In the low state, the remote is not sending anything;
the LED is off.
The 40KHz modulation is used to distriguish signals sent by
the remote control from other infrared radiation that is present in the
environment, such as radiation emitted by lights and by the sun.
Infrared remote controls from different manufacturers use
slightly different protocols. Philips, JVC, NEC, Sony, and Sharp have
their own protocols, and there are more. I programmed the MCU to emit
Sony remore control signals, because we have a Sony television. The web site of San
Bergmans provides good descriptions of many of these
protocols (in the knowledge base).
The Sony protocol, which is called SIRC (Sony InfraRed
Control), uses 40KHz pulses. It divides the timeline into 0.6ms
periods, which it uses to send 12-bit codes (there are also versions of
the protocol that uses longer codes, but I sent 12-bit codes). A single
low period follows a sequence of high periods. A transmission starts
with high 4 periods. These have no meaning; they just tell the receiver
to prepare for a code. These 4 high periods are followed by a low
period. Then the 12 bits of the code are sent, starting from the
least-significant bit. A 1 bit is represented by two high periods and a
0 bit by one high period. As I explained, every such sequence of high
periods is followed by exactly one low period. The code continues to be
sent every 75 periods (start to start) for as long as the user holds
the remote-control button.
This is pretty similar to Morse code, but a little more
logical. In both systems there are two different signals that are
represented by short or long periods of signal, separated by short
periods of no signal.
The codes themselves contain a 5-bit address, which specifies
the type of equipment the code is sent to (such as a television or a
DVD player) and a 7-bit command that tells the equipement what to do.
Programming The MCU
As I wrote, I found an example program that showed how
to send and receive data through the I2C
peripheral with the MCU serving as an I2C slave.
So the main challenge was to produce the SIRC signal that corresponds
to a 12-bit code that the NXT sends through an I2C
command.
Texas Instruments supplies an application note that shows how
to send Philips RC5 signals from an MSP430 processor, but I didn't like
their method, which required some tuning of parameters to get the
timing right. So I used a slightly different method.
I clocked the processor at 16MHz using the internal
oscillator. I configured the internal timer to count up to 399. Once it
reaches 399, it resets back to 0 and starts counting up again. The
timer has registers that allow you to do things when the count reaches
a certain value; I configured one of them to 133. This allows the
program to configure the timer's output so that one of the pins of the
chip is set to a logic high value when the timer resets and set to a
logic low when the timer reaches 133. This pin controls the LED (though
a switching transistor). When we configure the pin in this way, the LED
sends infrared pulses at 40KHz, with the LED on for 1/3 of the perios
and off for the rest (this asymmetry helps reduce power consumption in
remote controls). At 16MHz, the processor counts from 0 to 399 exactly
40,000 times, which gives us the required 40KHz modulation.
Now that we have the machanism to send a modulated signal, we
need to decide when to send it and when not to (when we do not need to
send a signal, the program simply disconnectes the pin from the timer
and sets explicitly it to a low value). To do this, I used another
timer, called the watchdog timer. This timer is primarily designed to
reset the chip if the program crashes, but it can be configured as an
interval timer to produce an interrupt every fixed number of clock
periods.
You cannot configure it to generate the interrupt after an arbitrary
number of clock ticks, only after 64, 512, 8192, or 32767. It is less
flexible than the main timer. I configured the interval timer to
generate an interrupt every 64 clocks. Every invocation of the
interrupt service routine (the function that the interrupt invokes)
increments a counter. When the counter reaches 150, the function knows
that a 0.6ms period has ended, and it changes the output of the
infrared LED. This works because 150×64=9600 clock cycles,
which is exactly 0.6ms when the clock frequency is 16MHz.
The picture above shows the
final working module. You can see the NXT cable at the lower right, the
adapter board with the MCU on the upper right, the 8-pin 3.3V regulator
near the top of the breadboard, the infrared LED at the end of the
yellow-blue wire on the left, and the transistor that turns the LED on
and off near the lower-left corner of the breadboard.
Receiving Remote-Control Signals
I have not yet built a circuit that can receive infrared
remote-control signals, but it is not too hard to do. The best way to
build the circuit is with a specialized infrared receiver module. These
modules have an infrared detector and an electronic circuit that
detects the modulation. They come in variants that are tuned to
specific modulation frequencies, such as 38KHz or 40KHz, but most of
them detect nearby frequencies as well, so a 38KHz detector (Radio
Shack sells one) usually detects 40KHz modulation and so on.
You can see such a module sticking out of the left side of the
breadboard in the picture above. I connected its output to a transistor
that switches a green LED on and off, to check that the infrared LED is
really modulated with a 40KHz signal.
You connect the output module of such a module to a pin of the
MCU and configure the MCU to generate an interrupt when the module
detects a signal. The interrupt signals the beginning of a
transmission. The interrupt service routine configures a timer that
generates an interrupt or two in every period of the infrared protocol
(0.6ms for SIRC), and you use the high/low sequence that is sampled to
decode the transmission. If the sampling detects some unexpected
behavior, perhaps from an incompatible remote control, you need to
abort the procedure, wait for the incompatible transmission to end, and
then start listening again for a signal.
Handling More Protocols
One of the advantages of using a microcontroller to generate
infrared signals is that you can extend the program to handle
additional protocols, say Philips RC5 or the protocol that the RCX used
for infrared communication. Specifications for these protocols are easy
to find, so there are good chances that you can build a gadget that can
control whatever equipment you have or that can receive commands from
remote controls that you have.
In the LEGO worlds, infrared was used for RCX communication and it is
used now for the remote-controlled trains. A new line of
infrared-controlled Technic motors is supposed to be released in summer
2007. I have not tried to control these with my I2C
remote control, but it should be certainly doable. HiTechnic has
announced an infrared transmitter/receiver for the NXT that will be
able to communicate with the RCX and to control the RC LEGO trains.
Here is the code.
I think it works, but I'm not 100% sure. I lost the original but found
a copy that I modified into another program. I edited that file to revert to the IR code, but
I didn't test it afterwards.
 The chip that I selected has
a cheap and convenient programming mechanism. Texas
Instruments sells a $20 programmer called the EZ430 that comes with one
chip (an
MSP320F2013) on a little adapter board that is easy to integrate into a
circuit. The company also sells $10 sets of
three MSP320F2012's
mounted on the same adapter boards. You can see the setup in the
figure. You plug the little adapter board into the 4-pin connector on
the programmer, and you plug the programmer into a USB port (or more
conveniently, into a USB extension cord). The adapter board comes with
2 rows of connection pads that give you access to all 14 pins of the
MCU. I soldered header pins to them, to make it easy for me to connet
wires to the chip and to plug the adapter board into a socket.
The chip that I selected has
a cheap and convenient programming mechanism. Texas
Instruments sells a $20 programmer called the EZ430 that comes with one
chip (an
MSP320F2013) on a little adapter board that is easy to integrate into a
circuit. The company also sells $10 sets of
three MSP320F2012's
mounted on the same adapter boards. You can see the setup in the
figure. You plug the little adapter board into the 4-pin connector on
the programmer, and you plug the programmer into a USB port (or more
conveniently, into a USB extension cord). The adapter board comes with
2 rows of connection pads that give you access to all 14 pins of the
MCU. I soldered header pins to them, to make it easy for me to connet
wires to the chip and to plug the adapter board into a socket.