This
web page provides information about ATLAS, a wildlife tracking system
designed and implemented
by the Minerva
Center for Movement Ecology.
For additional information, see the project's
page on the Minerva center's web site or the video below (by
Motti Charter).
The first ATLAS system has been operational since Spring 2014. A technical paper describing some of the ideas incorporated in it and documeting its accuracy in detail is available (Characterizing the accuracy of a self-synchronized reverse-GPS wildlife localization system by Adi Weller, Yotam Orchan, Ran Nathan, Motti Charter Anthony J. Weiss, and Sivan Toledo, to appear in the Proceeings of the 15th ACM/IEEE International Conference on Information Processing in Sensor Networks (IPSN), Vienna, Austria, April 2016).
Sivan Toledo is leading this effort in collaboration with Ran Nathan (HUJ life sciences and director of the Minerva Center for Movement Ecology), Tony Weiss (TAU-EE), and Arie Yeredor (TAU-EE). Additional contributors (past and present) include Oren Kishon, Adi Weller-Weiser, Bruria Berger, Ronny Ziss, Yotam Orchan, Yoav Bartan, Ari Lev-Or, Itamar Melamed, Avi Caciularu, Yoni Vortman, and Nir Sapir.
Basic information about the first generation of production tags is provided in our paper, "Lightweight low-cost wildlife tracking tags using integrated tranceivers" in Proceeings of the 6th Annual European Embedded Design in Education and Research Conference, September 2014 (IEEE digital library link). If you use these tags or their design, please cite this paper in publications that report results obtained with the tags or the design.
Results of research to determine what types of batteries are suitable for use with these tags is available in our paper "Evaluating batteries for advanced wildlife telemetry tags", IET Transactions on Wireless Sensor Systems, 2015 (click here for a postprint stored locally on this web site with permission of the publisher).
The hardware design files (schmatics, PCB layout, and bill of materials) are also available for download from CircuitHub.
Version 1.0 used a single cc430 microcontroller+radio chip. It is not available on CircuitHub but we can share the design files. It suffers from some drabacks (see our paper), but it may be more suitable for more sophisticated tags because it has much more memory and more pins to interface peripheral circuits (sensors, etc).
Coded pingers send a unique identifier using FSK modulation. This allows multiple pingers to use the same frequency and it allows the tag to be localized using time-of-arrival localization techniques. Receiving these transmissions requires a specialized receiver or a sampling receiver (sometimes called a software-defined radio or SDR) and appropriate software. We use SDR receivers; both hign-end USRP receivers work and low-cost USB dongle receivers work.
We are currently working on software that will allow basestations to communicate with our tags and to configure them (e.g., to instruct a tag that sleeps most of the time to conserve battery energy to start transmitting frequently). Howver, all the tags that we have deployed so far ping periodically. Pinging frequencies range from 4Hz to 1/8Hz. The length of each pulse can range from about 10us to about 250ms.
We have not publicly released any of this software yet. If you are interested in using our software, please contact us to discuss this.
Vision and Accomplishments
The ATLAS project aims to develop technologies for high-throughput tracking of wildlife and techniques and algorithms for analyzing the vast amounts of data that we expect to generate. Our main focus is on a so-called "reverse GPS" technology that can generate large amounts of accurate tracking data at relatively low cost, even for small-mass species (which cannot carry heavy GPS trackers). We expect the technology and the data that it will produce to transform the discipline of movement ecology and to address scientific questions that are today beyond reach.The first ATLAS system has been operational since Spring 2014. A technical paper describing some of the ideas incorporated in it and documeting its accuracy in detail is available (Characterizing the accuracy of a self-synchronized reverse-GPS wildlife localization system by Adi Weller, Yotam Orchan, Ran Nathan, Motti Charter Anthony J. Weiss, and Sivan Toledo, to appear in the Proceeings of the 15th ACM/IEEE International Conference on Information Processing in Sensor Networks (IPSN), Vienna, Austria, April 2016).
Sivan Toledo is leading this effort in collaboration with Ran Nathan (HUJ life sciences and director of the Minerva Center for Movement Ecology), Tony Weiss (TAU-EE), and Arie Yeredor (TAU-EE). Additional contributors (past and present) include Oren Kishon, Adi Weller-Weiser, Bruria Berger, Ronny Ziss, Yotam Orchan, Yoav Bartan, Ari Lev-Or, Itamar Melamed, Avi Caciularu, Yoni Vortman, and Nir Sapir.
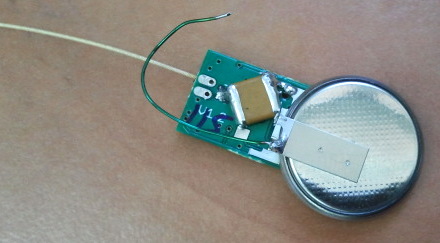
Wildlife Tracking Tags
This section page documents wildlife tracking tags designed by Sivan Toledo for use in ATLAS. They are also suitable for other wildlife tracking systems.Basic information about the first generation of production tags is provided in our paper, "Lightweight low-cost wildlife tracking tags using integrated tranceivers" in Proceeings of the 6th Annual European Embedded Design in Education and Research Conference, September 2014 (IEEE digital library link). If you use these tags or their design, please cite this paper in publications that report results obtained with the tags or the design.
Results of research to determine what types of batteries are suitable for use with these tags is available in our paper "Evaluating batteries for advanced wildlife telemetry tags", IET Transactions on Wireless Sensor Systems, 2015 (click here for a postprint stored locally on this web site with permission of the publisher).
Availability
The tags are commercially available in assembled PCB form from CircuitHub:- Version 1.2 (cc1101, MSP430g2452, 433MHz, 0.76g before battery, antenna, & coating)
- Version 1.4 (same circuit, lighter, obsolete)
- Version 1.6 (same circuit, only 0.39g before battery, antenna, and coating)
- Version 1.7 (similar to 1.6 but with a 330uF reservoir capacitor, 0.47g)
The hardware design files (schmatics, PCB layout, and bill of materials) are also available for download from CircuitHub.
Version 1.0 used a single cc430 microcontroller+radio chip. It is not available on CircuitHub but we can share the design files. It suffers from some drabacks (see our paper), but it may be more suitable for more sophisticated tags because it has much more memory and more pins to interface peripheral circuits (sensors, etc).
Programming
Tags are programmed using the two-wire spy-bi-wire interface. To program tags, we use a simple Texas Instruments programmer connected to a 6-pin no-legs Tag Connect programming cable. We use an MSP430 Value Line LauchPad board as the programmer.Software
Software that we have developed so far allows us to use the tags as CW pingers or coded pingers (or as both simulteneously). A CW pinger transmits short pulses of unmodulated RF energy at a particular frequency. These can be received by any UHF receiver that can receive SSB or CW transmissions and are used for homing in on an animal. Different tags transmit at different frequencies, allowing the user to listen to a particular tag. Currently frequencies differ by about 25kHz. The range of frequencies allocated to unlicensed unprotected short-range devices (SRD) is 433.05 to 433.79MHz. The tags can also be produced for operation on the 868 or 915MHz bands, although we have not tried this yet.Coded pingers send a unique identifier using FSK modulation. This allows multiple pingers to use the same frequency and it allows the tag to be localized using time-of-arrival localization techniques. Receiving these transmissions requires a specialized receiver or a sampling receiver (sometimes called a software-defined radio or SDR) and appropriate software. We use SDR receivers; both hign-end USRP receivers work and low-cost USB dongle receivers work.
We are currently working on software that will allow basestations to communicate with our tags and to configure them (e.g., to instruct a tag that sleeps most of the time to conserve battery energy to start transmitting frequently). Howver, all the tags that we have deployed so far ping periodically. Pinging frequencies range from 4Hz to 1/8Hz. The length of each pulse can range from about 10us to about 250ms.
We have not publicly released any of this software yet. If you are interested in using our software, please contact us to discuss this.