Shifting Gears: A NXT Vehicle with a Transmission
 This is really just a fun project, and it is more about
modelling cars than about robotics (I'll explain why later). One NXT
motor drives the car, a second NXT motor steers it, and a third
controls the transmission. Apart from the NXT brick, from the three
motors, the touch sensor, and the motor/sensor cables, the parts are
not from the NXT kit. Most of the parts are from Lego set 8421, a large
Technic crane.
This is really just a fun project, and it is more about
modelling cars than about robotics (I'll explain why later). One NXT
motor drives the car, a second NXT motor steers it, and a third
controls the transmission. Apart from the NXT brick, from the three
motors, the touch sensor, and the motor/sensor cables, the parts are
not from the NXT kit. Most of the parts are from Lego set 8421, a large
Technic crane.
Don't miss the video (10MB)!
This car uses somewhat exotic Technic transmission parts. Technica
is a good place to learn about these and other Technic parts. You can
build transmissions without these parts, but I had them (from 8421) and
wanted to try to use them in a powered transmission (I found that they
are not perfect for powered transmissions; this is explained below).
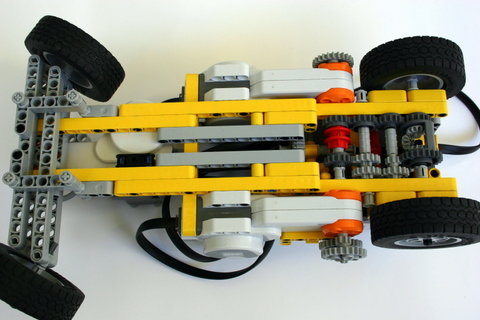
The next image (on the left) shows the underside of the car, and the
one on the right shows the car
with the NXT brick removed to reveal the transmission. The yellow beams
above the transmisison, which go from one side of the vehicle
to the other, both provide structural stiffening and they support the
NXT brick.

I think that this car is pretty cool, but it is not very sophisticated relative to some Lego
vehicles and machines that people have built. Take a look at the web sites of
Jennifer Clark, Beat Felber, and Thomas J. Avery, for example, to see how sophisticated
homebrewed Lego
models can get. You'll be amazed.
The Transmission

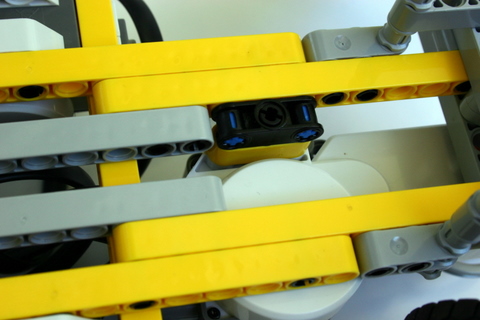
The
first
picture shows the tranmission from the top. The motor that powers the
tranmissoin (near the top of the image turns an 8t gear, which rotates
the 24t gear you see at the top. This gear is connected to the 4k
yellow knob gear, which causes another gear of the same type mounted at
90 degrees to turn. The reason I used these 4k knob gears is that they
can transfer an incredible amount of torque. I first tried to use
various bevel and crown gears, but they kept slipping. After some
experimentation I discovered that the 4k knob gears are ideal for such
situations: because of the large knobs, it's almost impossible for them
to slip. The 4k knob gear is mounted on the same axle as a 20t double
bevel gear (hidden below the yellow beam on the left side of the
image), which turns another 20 double bebel, which turns the red
changeover catch. This catch moves the red driving ring sideways, and
this is what operates the transmission.
The axle that rotates the driving ring should be located on a
half-stud position relative to the frame of the car. I mounted the axle
in this position using a 2x2 split double cross block connected to 1x2
cross block.
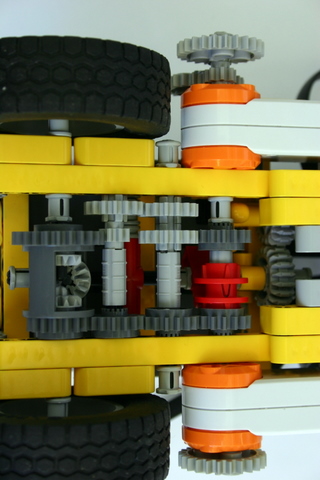 The
second picture shows the bottom side of the tranmission. The motor
that powers the transmission is now on the top of the figure. The two
20t double-bevel gears that operate the changeover catch are visible on
the right. The driving ring engages either of the dark gray 16t gears
with the axle that is connected directly to the driving motor (the
bottom one). These gears have a round hole for the axle, not a
cross-shaped hole, so they normally rotate freely on the axle, but a
driving ring can engage them. Therefore, either the gearing on the
bottom is powered, or the one on the top. The one on the top consists
only of freely-rotating 20t gears. If this chain is engaged, the
differential turns once for every rotation of the motor. If the gear
chain on the top is engaged, the axle rotates once for every 3
rotations of the motor.
The
second picture shows the bottom side of the tranmission. The motor
that powers the transmission is now on the top of the figure. The two
20t double-bevel gears that operate the changeover catch are visible on
the right. The driving ring engages either of the dark gray 16t gears
with the axle that is connected directly to the driving motor (the
bottom one). These gears have a round hole for the axle, not a
cross-shaped hole, so they normally rotate freely on the axle, but a
driving ring can engage them. Therefore, either the gearing on the
bottom is powered, or the one on the top. The one on the top consists
only of freely-rotating 20t gears. If this chain is engaged, the
differential turns once for every rotation of the motor. If the gear
chain on the top is engaged, the axle rotates once for every 3
rotations of the motor.
The transmission is fairly reliable, but it requires careful
tuning. It is pretty easy for the catch to turn too much and escape the
driving ring. This causes the transmission to fail. To avoid this, you
have to use an appropriate amount of rotation (that is, to tell the
motor to rotate the "correct" number of degrees), and you have to
carefully set the starting position of the transmission. This problem
led me to conclude that the Technic transmission parts are not ideal
for transmission that are powered by NXT motors.
Shifting gears also requires a lot of torque, so the shifting
mechanism must be robust. This is why I used the 4k knob gears. Perhaps
using a lever to move the changeover catch would have eliminated this
problem, but I did not have any idea how to construct an appropriate
mechanism.
Steering
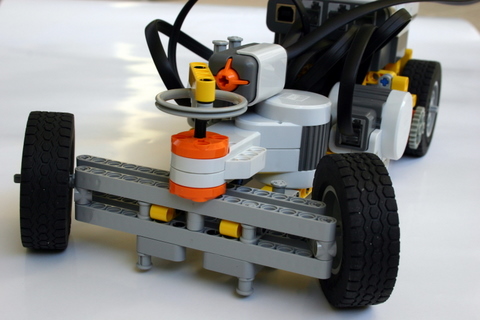
The
steering motor is connected to a pair of 1x3 liftarms (the end of the
lifarms is the gray part showing between the ends of the two yellow
parts). The rotation of the motor and of the liftarms causes the long
gray beams toward the back of the vehicle to move left or right, which
causes the wheels to turn.
The touch sensor allows the NXT to return the streering to the straight
position. The beam activates the touch sensor when the wheels are still
slightly turned. To correct for this, the program stops the motor when
the touch sensor closes, but then turns it again 7 degrees, which
returns the streeting exactly to the straight position.
The touch sensor is mounted on the streeting motor, not on the
frame of the car.
The large pulley is used to position the yellow beam that activates the
touch sensor at a half-stud position relative to the touch sensor. This
allows the beam to press the
sensor without getting stuck.
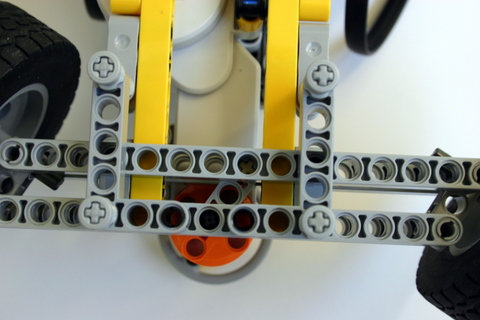
The next images show the underside of the steering mechanism,
and the way the steering engine is connected to the chasis.
Cars Versus Robots
Are these car-like mechanisms good for moving a robot around?
Probably not. A differential drive (as in Tribot) provides more power
to the wheels (two driving motors instead of one), allows for
more accurate turning, and it allows for turning in place or almost in
place. The transmission is not that useful either in most cases. It can
allow the vehicle to go fast, but in most situations, going fast makes
it more difficult to achieve precise movements.
© 2006, Sivan Toledo